
이 글에서는 제어 시스템의 핵심인 극점(Pole)의 위치가 시스템의 시간 영역 응답과 안정성에 어떤 영향을 미치는지 정리합니다.
극점 위치와 시간 영역(Time Domain) 응답의 관계
시스템의 전달 함수에서 극점의 위치는 출력 파형의 모양을 결정짓는 가장 중요한 요소입니다.
1차 시스템
극점이 실수축에만 존재하며, 진동 없이 목표치에 도달하거나 0으로 수렴합니다. 이때 극점의 위치($-\alpha$)는 응답 속도를 결정합니다.
2차 시스템
극점이 켤레 복소수 형태($-\alpha \pm j\omega$)로 존재할 수 있습니다. 이때 실수부는 감쇄를, 허수부는 진동을 담당합니다.

S-평면(S-plane)에서의 경향성
복소 평면상에서 극점의 위치가 변함에 따라 시스템의 거동은 다음과 같이 달라집니다.
실수축 (Real Axis, $\sigma$)
신호의 감쇄 또는 발산 속도를 나타냅니다. 왼쪽으로 갈수록(음의 실수값이 커질수록) 감쇄가 빨라져 시스템이 빠르게 안정화됩니다. 반대로 오른쪽(양의 실수 영역)으로 넘어가면 시간이 지날수록 진폭이 커져 시스템이 발산(불안정)합니다.
허수축 (Imaginary Axis, $j\omega$)
신호의 진동 주파수를 나타냅니다. 원점에서 위아래로 멀어질수록 주파수가 빨라져 고주파 진동을 하게 됩니다.

제동 계수(Damping Ratio, $\zeta$)와 과도 응답
제동 계수 $\zeta$(제타)는 시스템이 목표값에 도달할 때의 과도 응답 특성을 결정합니다. 안전 영역은 통상 $0 < \zeta < 1$ 범위 내에서 해석합니다.

부족 제동 (Underdamped, $0 < \zeta < 1$)
목표값을 초과하는 오버슈트(Overshoot)가 발생하며 진동하면서 수렴합니다. 제동 계수가 작을수록 오버슈트는 더 커집니다.
임계 제동 (Critically Damped, $\zeta = 1$)
오버슈트가 발생하지 않는 조건 중에서 가장 빠르게 목표값에 도달하는 이상적인 상태입니다.
과제동 (Overdamped, $\zeta > 1$)
오버슈트는 없으나, 목표값에 도달하는 속도가 느립니다.4. 결론: 안정도 판별
결과적으로 시스템의 안정도는 극점이 S-평면의 어느 쪽에 위치하느냐에 달려 있습니다.
좌반면 (Left Half Plane)
모든 극점이 허수축 왼쪽에 있으면 시간 흐름에 따라 진폭이 줄어들어 안정(Stable)합니다.
우반면 (Right Half Plane)
극점이 하나라도 허수축 오른쪽에 존재하면 진폭이 계속 커져 불안정(Unstable)해집니다.
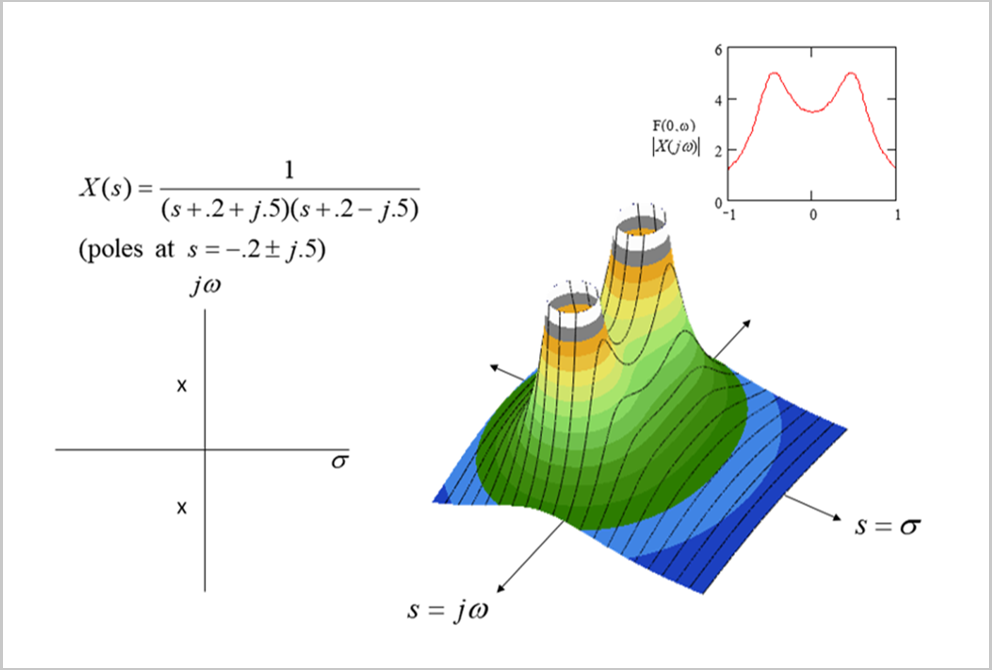
극점 위치와 주파수 응답의 3차원적 이해
S-평면을 3차원 지형으로 확장하면 극점과 주파수 응답 사이의 관계를 직관적으로 이해할 수 있습니다.
S-평면의 산봉우리
전달 함수 $X(s)$를 3차원으로 그리면 극점 위치에서 값이 무한대로 치솟아 마치 산봉우리 같은 모양이 됩니다
주파수 응답의 단면
우리가 흔히 보는 주파수 응답 곡선은 이 3차원 지형을 허수축($j\omega$)을 따라 자른 단면과 같습니다
공진(Resonance) 원리
극점이 허수축에 가까이 붙어 있을수록(실수부가 0에 가까울수록), 허수축을 따라 지나갈 때 산봉우리의 영향을 강하게 받아 주파수 응답 그래프에서 뾰족한 피크(공진)가 나타납니다.
'제어 이론' 카테고리의 다른 글
| [제어 이론-6] 복잡한 시스템도 결국 'Single Pole'의 반복일 뿐이다 (1) | 2025.12.04 |
|---|---|
| [제어 이론-5] P·I·PI·PID 제어기의 구조와 PI 근궤적(Root Locus) 해석 (0) | 2025.12.04 |
| [제어 이론-1] 특성 방정식과 전달 함수, 왜 극점(Pole)이 중요한가? (1) | 2025.12.04 |
| [제어 이론-3] 피드백 제어의 목적 : 극점 이동과 오차 감소·제거 (1) | 2025.12.03 |
| [제어 이론-4] 근의 궤적(Root Locus) 개념부터 PI 제어기 설계까지 (0) | 2025.12.03 |