
전력전자 제어 설계에서 가장 빈번하게 사용되는 단일 극점 (1-Pole) 시스템은 PI 제어기의 영점을 시스템의 극점과 일치시킴으로써 제어 구조를 비약적으로 단순화할 수 있습니다. 특히 저항(R)과 인덕터(L)가 직렬로 연결된 전류 제어 시스템과 전동기의 전류제어에서 이 기법은 표준 설계 방식으로 통합니다.
대상 시스템의 이해: RL 직렬 모델
실제 인덕터는 순수한 유도 성분(L) 외에도 내부 권선 저항(R)을 포함합니다. 이 시스템의 전달 함수는 다음과 같습니다.

이 식에서 시스템의 극점(Pole)은 s = -R/L에 위치하며, 이는 시스템의 시정수가 L/R임을 의미합니다.
PI 제어기 설계 및 상쇄 원리
PI 제어기는 원점의 극점 (s=0) 과 하나의 영점 (s=-1/\tau)을 시스템에 추가합니다.

제어기의 시정수($\tau$)와 시스템의 시정수(L/R)를 동일하게 설정합니다. 이렇게 하면 PI 제어기의 원점 극점만 남으며, 이런 방법을 극-원점 상쇄 (pole-zero cancellation) 방법이라고 합니다.
- 설계 핵심: Tau = L/R
- 상쇄 결과: 제어기의 영점(-1/Tau)이 시스템의 극점(-R/L)을 정확히 지워버립니다.
- 단순화된 모델 결과: 시스템의 느린 응답을 유발하는 극점이 상쇄되고, 원점에 단일 극점만 남은 단순 적분기 모델이 됩니다.


대역폭 제약 Fcb 및 Kp 결정
비례 게인 Kp 는 단일 원점 극점 시스템에서와 동일하게, 다음과 같이 구해집니다.

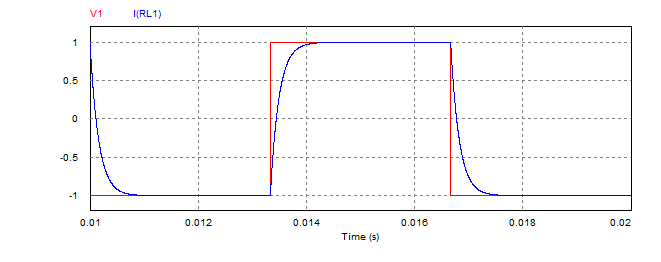
PI 전류 제어기 설계 및 모의시험 검증
R = 1 ohm, L=1 mH 인 저항 성분을 포함한 인덕터 시스템에서 극점-영점 상쇄 기법을 적용하여 목표 대역폭, Fcb = 1 KHz가 되도록 구체적인 설계 예시를 정리합니다.
PI 제어기의 Tau = L/R = 1 msec, Fcb = 1 KHz

'제어 이론' 카테고리의 다른 글
| [제어 이론-12] 전압 앞먹임(Feed-forward, 전향 보상) 보상의 필요성 (0) | 2026.01.10 |
|---|---|
| [제어 이론-11] 제어 응답 주파수, 센서 대역폭, 그리고 스위칭 주파수 사이의 관계 (0) | 2026.01.10 |
| [제어 이론-9] 원점 단일 극점(Single Pole) 시스템의 PI 제어 (0) | 2026.01.09 |
| [제어 이론-8] 원점 단일 극점(Single Pole) 시스템의 비례 제어 (0) | 2025.12.04 |
| [제어 이론-7] 주파수 영역에서 제어 응답 주파수와 대역폭 (0) | 2025.12.04 |