
제어 시스템을 설계할 때 수학적인 모델은 무한한 출력이 가능하다고 가정하지만, 실제 장치에는 항상 출력 가능한 전압이나 속도에 한계치가 존재합니다. 오늘은 이 한계치로 인해 발생하는 성능 저하를 막는 필수 기법을 살펴보겠습니다.
1. 와인드업(Windup) 현상의 발생
제어기가 시스템의 한계치를 초과하는 출력을 요구하면, 실제 출력은 그 한계치에 묶여 더 이상 증가하지 못합니다. 예를 들어 벅 컨버터(Buck Converter)의 경우, 제어기가 아무리 높은 전압을 명령해도 실제 출력 가능한 전압의 최대치는 공급되는 직류 전압(DC Link)으로 한정됩니다.
- 응답 지연: 적분기는 이 물리적 한계를 인지하지 못한 채 오차를 계속 쌓아 나가며, 목표값에 도달한 후에도 쌓인 값이 줄어들 때까지 제어 출력을 한계치에 머물게 만듭니다.
- 오버슈트 발생: 제어기가 제때 반응하지 못하면서 시스템이 목표를 크게 지나치고 진동하는 현상이 나타납니다.
2. 안티 와인드업(Anti-windup)의 원리
안티 와인드업은 시스템에 한계치가 발생했을 때 적분 동작을 지능적으로 제어하여 응답이 느려지는 것을 방지하는 기술입니다.
- 적분 정지: 제어 출력이 전원의 최대치(직류 전압) 등 물리적 한계치에 도달하면 적분 연산을 즉시 중단하여 불필요한 오차 누적을 차단합니다.
- 즉각적 회복: 적분값이 한계치 내에서 관리되므로, 시스템이 안정 범위로 돌아오는 순간 지연 없이 제어 성능을 회복합니다.
3. 시뮬레이션을 통한 효과 검증
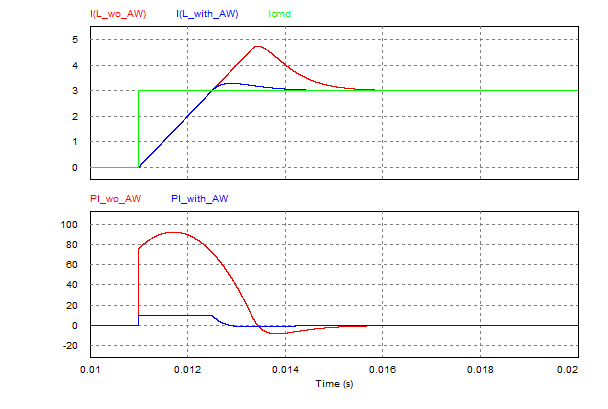
주인님의 실험 자료를 보면 안티 와인드업의 유무가 제어 품질에 미치는 영향이 극명합니다.
- 적분기 한계 안 됨 (Anti-windup 미적용): 한계치 도달 후 적분기 과부하로 인해 응답이 느려지고 큰 진동이 발생합니다.
- 적분기 한계 됨 (Anti-windup 적용): 한계치 발생 시 적분을 적절히 정지시켜, 응답이 느려지는 것을 방지하고 신속하게 목표값에 안착합니다.

'제어 이론' 카테고리의 다른 글
| [제어 이론-15] IP 제어기: 느리지만 안정적인 제어 (0) | 2026.01.10 |
|---|---|
| [제어 이론-14] 이중 루프(Nested Loop) 제어: L-C 2차 시스템은 2개의 1차 시스템으로 나눠서 제어 (0) | 2026.01.10 |
| [제어 이론-12] 전압 앞먹임(Feed-forward, 전향 보상) 보상의 필요성 (0) | 2026.01.10 |
| [제어 이론-11] 제어 응답 주파수, 센서 대역폭, 그리고 스위칭 주파수 사이의 관계 (0) | 2026.01.10 |
| [제어 이론-10] 극점-영점 상쇄를 이용한 PI 제어로, 저항이 포함된 인덕터의 전류를 제어 (0) | 2026.01.09 |