
LCL 필터는 우수한 고주파 차단 특성을 지니지만, 필터 내부의 인덕터와 커패시터가 상호작용하며 특정 주파수에서 임피던스가 급격히 낮아지는 공진(Resonance) 현상을 일으킵니다. 이를 방지하기 위한 기술적 해법을 상세히 기술합니다.
1. 하드웨어 회로 구성과 수동 소자의 역할
LCL 필터 회로는 전형적인 3차 필터 구조로, 각 소자는 다음과 같은 임무를 수행합니다.
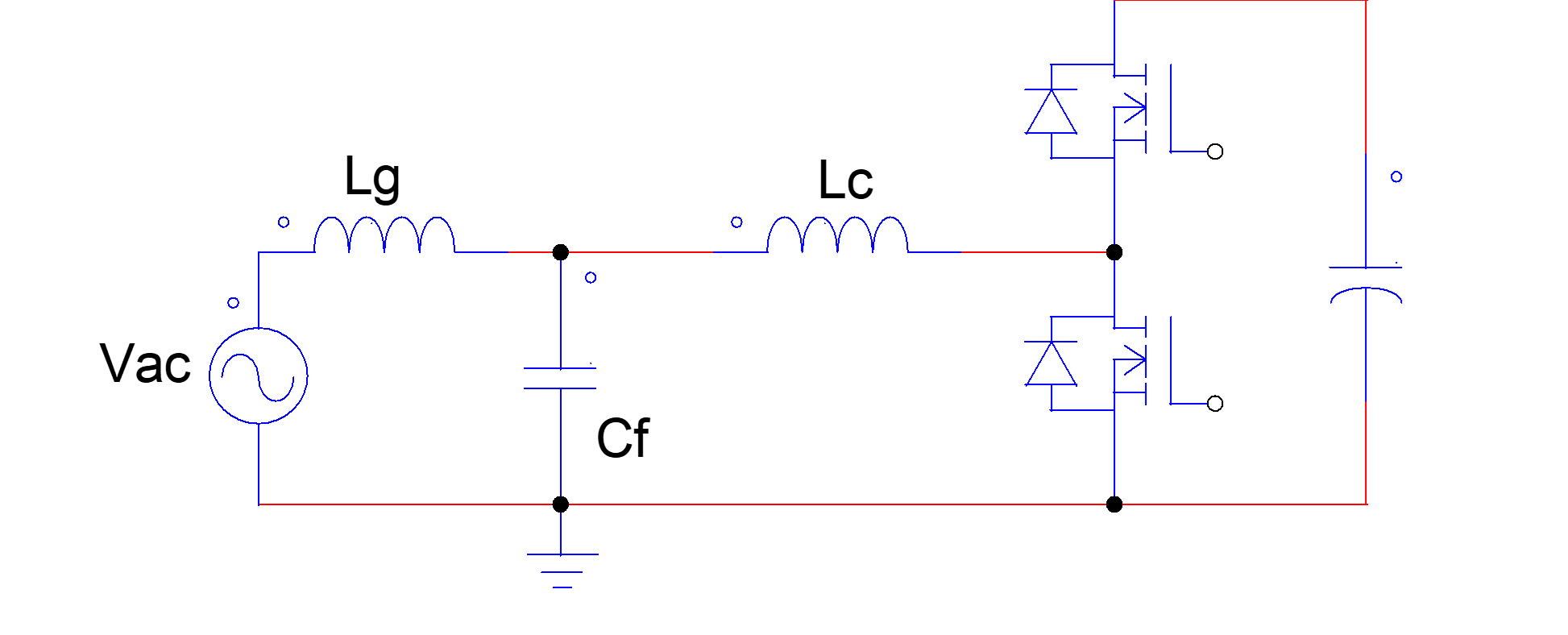
- 인버터 측 인덕터 (Lc): 스위칭 전압에 의해 발생하는 전류 리플을 직접적으로 억제합니다.
- 필터 커패시터 (Cf): 스위칭 주파수 성분에 대해 낮은 임피던스 경로를 제공하여 에너지를 지면으로 흘려보냅니다.
- 계통 측 인덕터 (Lg): 계통으로 유입되는 전류의 고조파를 최종적으로 걸러내어 IEEE 519 등 국제 기준에 부합하는 전류 품질을 확보합니다.
2. 능동 제동의 제어적 원리: 가상 저항(Rd)
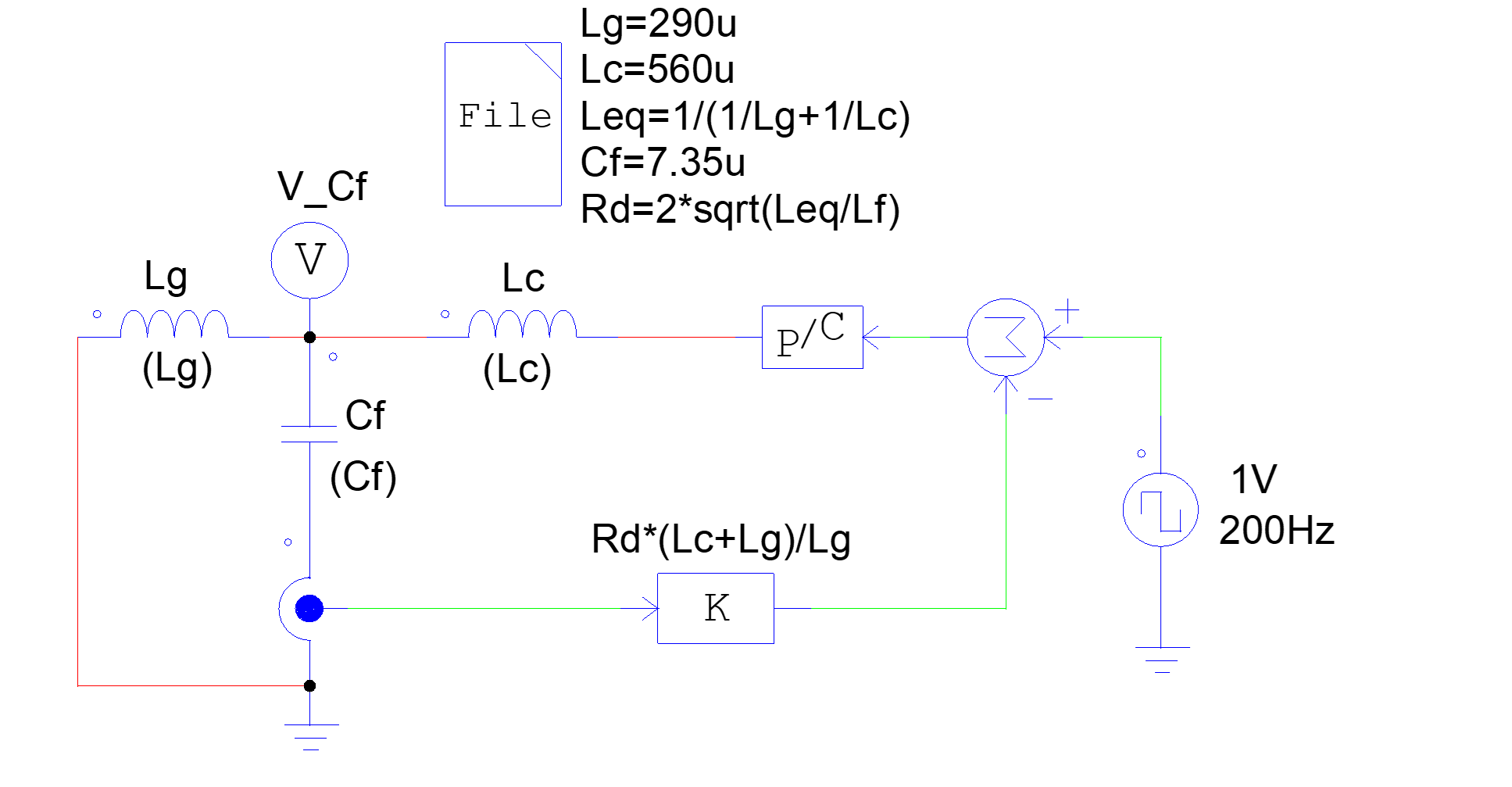
능동 제동은 물리적인 저항을 연결하는 대신, 커패시터에 흐르는 전류(I_Cf)를 측정하여 이를 제어 루프에 음의 궤환(Negative Feedback)으로 돌려주는 방식입니다.
- 물리적 해석: 제어기에서 전류에 이득 K를 곱해 전압 명령에 반영하면, 이는 전기적으로 커패시터와 직렬로 연결된 가상 저항(Rd)이 존재하는 것과 같은 수학적 효과를 냅니다.
- 이득 결정: 이론적으로 가장 안정적인 Zeta(제타) = 1 (임계 감쇠) 을 만족하는 Rd는 다음과 같습니다

3. 핵심 설계: 전압 분압 보상 계수
제어 이득 K를 단순히 Rd로 설정하면 안 되는 결정적인 이유는 LCL 필터의 분압 특성 때문입니다.
- 현상: 인버터 출력 전압(V_inv)은 인덕터 Lc와 계통측 임피던스(주로 Lg) 사이에서 분배됩니다. 커패시터 지점에 실제로 인가되는 유효 전압은 전체의 Lg / (Lc + Lg) 배 입니다.
- 해법: 제어기에서 생성한 댐핑 신호가 이 분압 과정을 거치며 약화되는 것을 미리 계산하여, 이득 K에 분압 비율의 역수인 (Lc + Lg) / Lg를 곱해줍니다. 이를 통해 커패시터 지점에서 설계한 Rd 값이 정확하게 발현되도록 만듭니다.
4. 디지털 제어 주파수 추천
디지털 제어기의 연산 처리 시간과 ADC 동작으로 인한 위상 지연을 보상하기 위해, 제어 주파수를 공진 주파수의 10배 이상으로 설정하는 것이 권장됩니다. 이를 통해 충분한 위상 여유를 확보하고 안정적인 댐핑 성능을 구현할 수 있습니다.
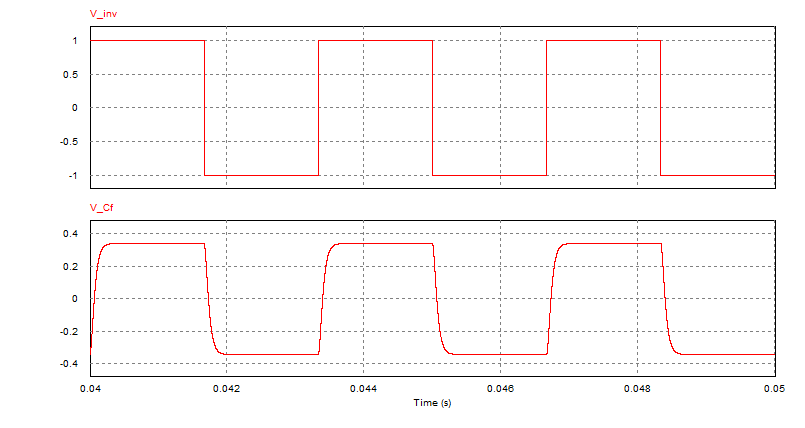
5. 설계 예시 및 모의 시험
능동 제동 제어를 적용하면 공진 성분이 효과적으로 억제되어, 공진에 의한 진동이 크게 감소함을 확인할 수 있습니다.

'제어 이론' 카테고리의 다른 글
| [제어 이론-22] 지배 극점(Dominant Pole): 제일 느린 극점이 전체를 좌우한다 (0) | 2026.02.09 |
|---|---|
| [제어 이론-50] DQ 좌표 변환과 비간섭 전향 보상(Feed-forward) (0) | 2026.01.16 |
| [제어 이론-20] 직류 링크 L-C 필터 능동 제동(Active Damping) (0) | 2026.01.12 |
| [제어 이론-17] 비선형 시스템의 스텝 응답으로부터 PI 제어기 설계 (0) | 2026.01.12 |
| [제어 이론-19] PWM 컨버터의 진동을 억제하는 두 가지 능동 제동(Active Damping) (0) | 2026.01.11 |