
1. DQ 변환을 왜 하는가
3상(ABC) 체계는 에너지 전달에는 유리하지만, 제어 관점에서는 축이 서로 결합되어(간섭되어) 수식이 복잡해집니다. DQ 좌표 변환의 목적은 다음 두 가지입니다.
- 교류 성분을 회전 좌표계에서 직류처럼 보이게 만들어 제어를 단순화
- 변환 과정에서 드러나는 축 간 간섭항을 전향 보상으로 상쇄하여 비간섭 제어 구현
2. PSIM을 기준으로 한다
이 문서는 PSIM 라이브러리의 abc - dq 정의를 기준합니다.
- 상순서(값, 시간 파형 기준): A → B → C, Ds → Qs
- A상 - Ds상 위상이 일치
- DQ 전압 벡터의 크기가 3상 선간전압 실효치와 일치(전력 불변, power-invariant)
- 참고로, PSIM은 전압 크기 일치임( amplitude-invariant)
3. 표기 약속
- Ds, Qs: 정지 좌표계 성분(Stationary)
- Dr, Qr: 회전 좌표계 성분(Rotating)
- p: 시간 미분 연산자
- s: 라플라스 변수(전달함수/주파수 해석에서만 사용)
4. 좌표계의 직관

- 정상 상순서 A → B → C 는 벡터가 반시계로 회전하면서 A축, B축, C축 방향을 그 순서대로 지나간다는 뜻입니다. 그래서 각 상의 값도 A가 먼저 가장 크게 나타나고, 다음이 B, 그 다음이 C입니다.
- 정지좌표계의 Qs와 Ds도 원리는 같습니다. V가 반시계로 회전하면 먼저 Qs축 방향에 가까워졌다가, 조금 더 돌면 Ds축 방향에 가까워집니다. 그래서 큰 값은 Qs가 먼저, 다음이 Ds에서 나타납니다.
- 마지막으로 "V를 -ωt 만큼 회전시킨다”는 표현은, 벡터가 회전하는 것을 관찰자(좌표축)가 같이 따라 돌도록 관점을 바꾼다는 뜻입니다. 즉, 돌아가는 벡터를 그대로 쫓아가며 바라보면 회전좌표계에서의 값이 되고, 그 결과 교류가 마치 직류처럼 보이게 됩니다.
5. 회전 좌표계에서 왜 p → p - jω가 되는가
5.1 "기준축이 회전"하면 미분에 추가항이 붙는다
회전 좌표계는 관찰 기준축 자체가 ω로 회전합니다. 그러면 어떤 벡터를 "회전하는 축에서 본 미분"은 "정지축에서 본 미분"과 같지 않고, 회전 때문에 추가항이 생깁니다.
복소 벡터로 표현하면: p → p − jω. 여기서 부호는 회전 방향과 좌표계 정의에 따라 달라질 수 있지만, 중요한 것은 ω가 곱으로 붙는 항이 추가된다는 구조입니다.
5.2 예시: V = sLI 를 회전 좌표로 옮기면 무엇이 달라지는가
라플라스 영역에서는 다음처럼 씁니다.
$$V(s)=sLI(s)$$
이를 시간 영역으로 옮기면 다음이 됩니다.
$$V=LpI$$
회전 좌표계로 변환하면 미분 연산자 p가 (p − jω)로 바뀌어, 다음처럼 됩니다.
$$V=L(p-j\omega)I$$
여기서 새로 붙는 ω 항이 DQ 식에서 나타나는 결합(간섭) 항의 근원입니다.
6. 전향 보상(비간섭) 항의 수식 유도
회전 좌표계로 바꾸면 축 간 간섭항이 수식에 투명하게 드러납니다.
6.1 정지 좌표계(Stationary) 기본식 (인덕터 단순 모델)
$$V_{qs} = Lp I_{qs}, \quad V_{ds} = Lp I_{ds}$$
복소 벡터로 묶으면:
$$V_{qs}+jV_{ds} = Lp(I_{qs}+jI_{ds})$$
6.2 회전 좌표계로 변환될 때 미분 연산자 변화
회전 좌표계에서는 기준축이 ω 로 회전하므로:
$$p \rightarrow p - j\omega$$
따라서 회전 좌표계에서:
$$V_{dr}+jV_{qr} = L(p-j\omega)(I_{dr}+jI_{qr})$$
6.3 실수부/허수부 분리 → 최종 방정식
전개 후 실수부와 허수부를 분리하면:
d축 방정식: $$V_{dr} = Lp I_{dr} + \omega L I_{qr}$$
q축 방정식: $$V_{qr} = Lp I_{qr} - \omega L I_{dr}$$
간섭항(결합항):
- d축에 섞이는 항: $+\omega L I_{qr}$
- q축에 섞이는 항: $-\omega L I_{dr}$
이 항이 존재하는 한, d축과 q축은 완전히 독립이 아닙니다.
7. 비간섭 전향 보상(Feed-forward) 설계
7.1 목표
- d축 제어기는 $I_{dr}$만
- q축 제어기는 $I_{qr}$만
다루도록 만드는 것입니다.
7.2 전향 보상 항 (기본형)
위 식 기준(PSIM 기준)으로 필요한 전향 보상은 다음 두 항입니다:
- d축 전향 보상: $+\omega L I_{qr}$
- q축 전향 보상: $-\omega L I_{dr}$
PI 출력이 $(V_{dr,PI}, V_{qr,PI})$라면 실제 전압 지령은:
$$V_{dr}^{*} = V_{dr,PI} + \omega L I_{qr}$$
$$V_{qr}^{*} = V_{qr,PI} - \omega L I_{dr}$$
이렇게 하면 각 축 방정식에서 상대 축 전류가 섞여 들어오는 효과가 상쇄되어, 두 축이 거의 독립적으로 동작합니다.
8. PSIM 모의시험
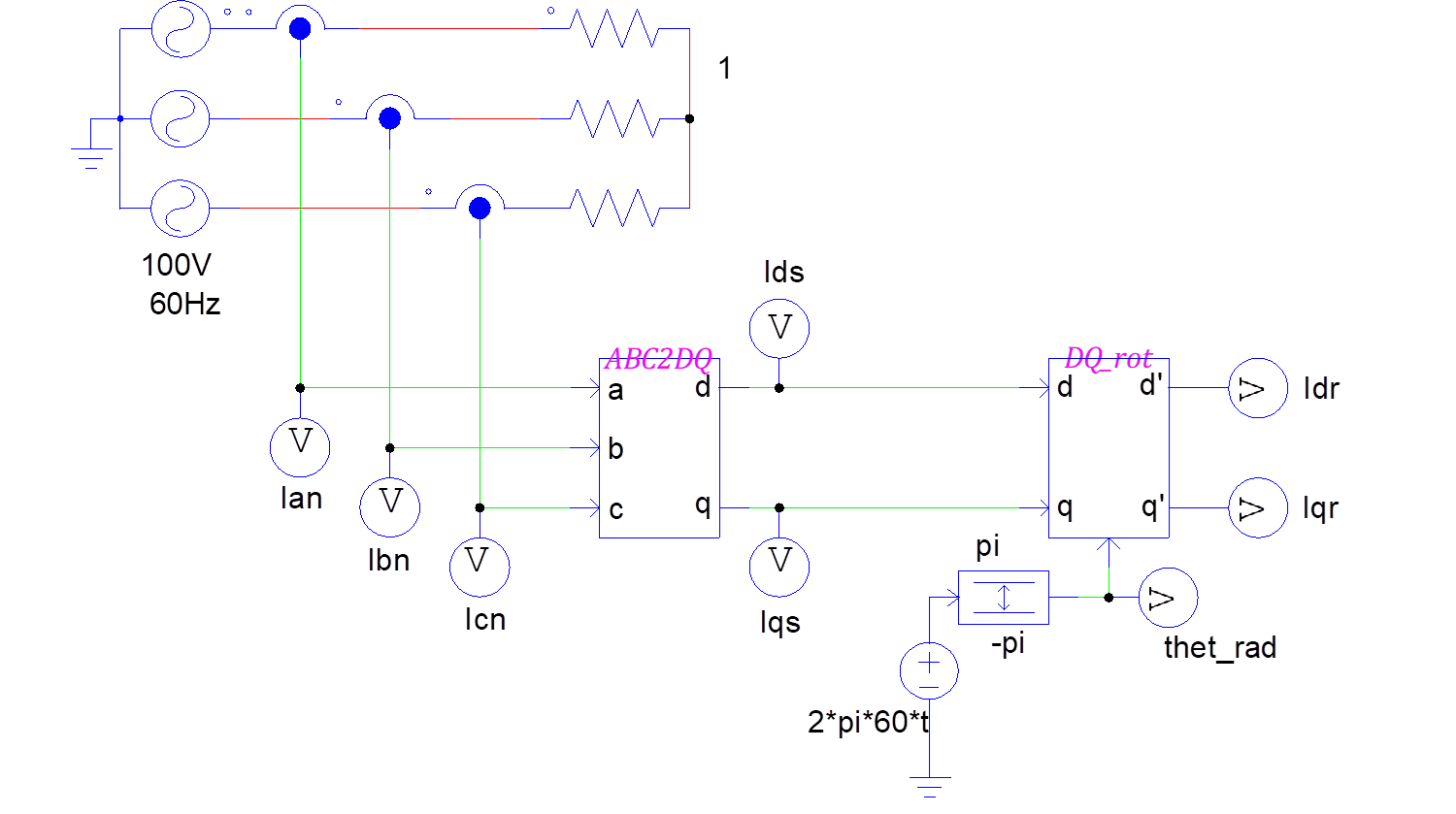
8.1 전압 검출 A B C → D Q

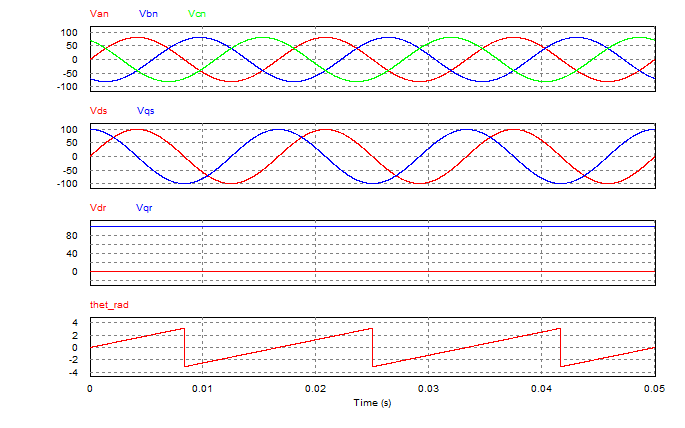
8.2 전류 검출 A B C → D Q

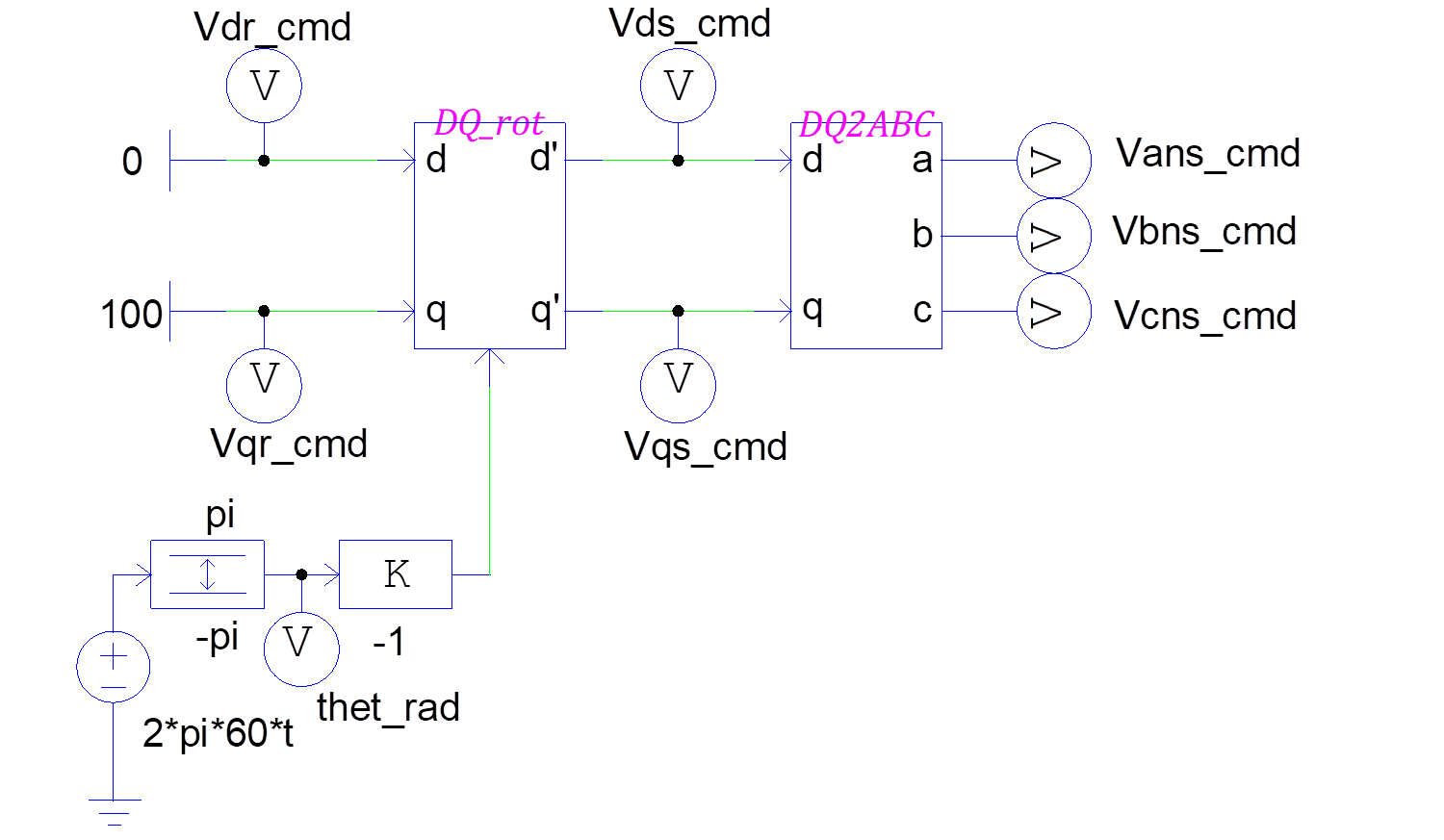
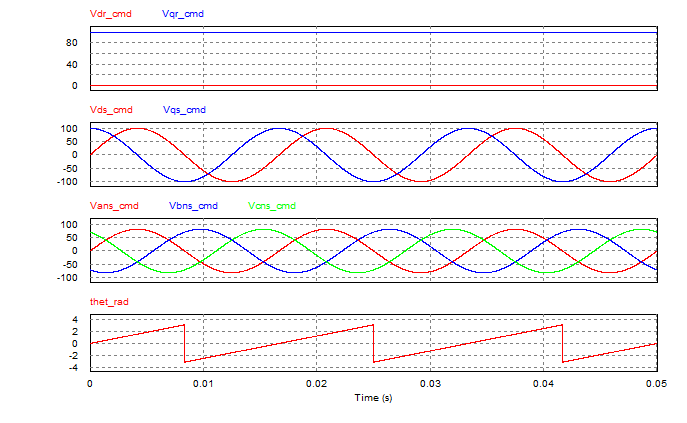
8.3 전압 지령 D Q → A B C
.
'제어 이론' 카테고리의 다른 글
| [제어 이론-22] 지배 극점(Dominant Pole): 제일 느린 극점이 전체를 좌우한다 (0) | 2026.02.09 |
|---|---|
| [제어 이론-21] PFC용 LCL 필터 공진 해석과 능동 제동(Active Damping) (0) | 2026.01.13 |
| [제어 이론-20] 직류 링크 L-C 필터 능동 제동(Active Damping) (0) | 2026.01.12 |
| [제어 이론-17] 비선형 시스템의 스텝 응답으로부터 PI 제어기 설계 (0) | 2026.01.12 |
| [제어 이론-19] PWM 컨버터의 진동을 억제하는 두 가지 능동 제동(Active Damping) (0) | 2026.01.11 |