
직류 전력 시스템의 안정성을 확보하려면 직류 링크단의 공진 억제가 필수적입니다. 본 글에서는 도시철도 차량 내 보조전원을 공급하는 SIV(Static Inverter)를 사례로 가정하고, 직류 링크의 LC 필터 공진주파수인 25Hz 공진을 하드웨어 추가 없이 소프트웨어만으로 억제하는 능동 제동 기법을 소개합니다.
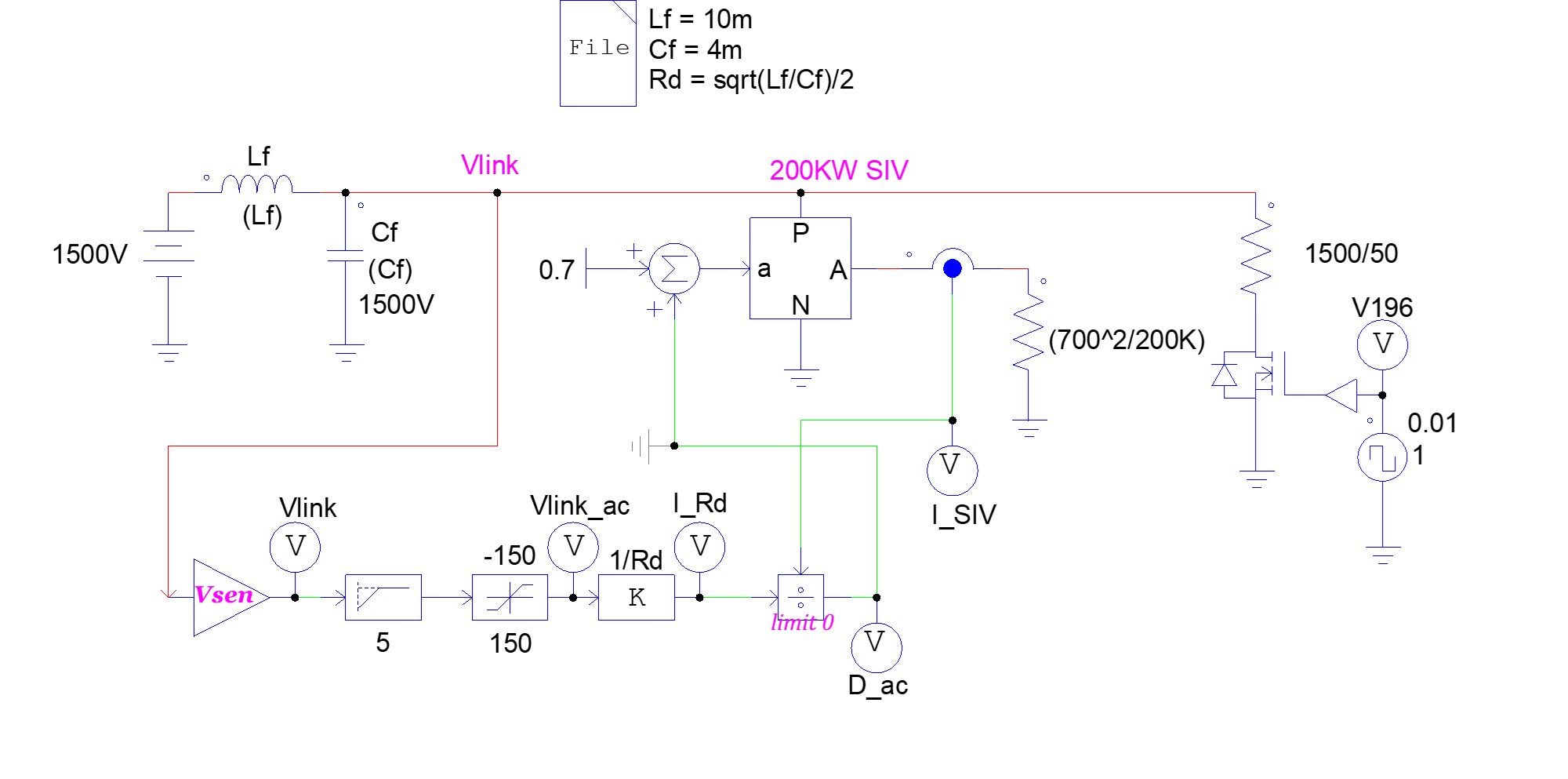
철도차량에서는 SIV 부하에 연결된 공기압축기(에어 컴프레셔)가 직입 기동할 때, 직류 링크의 공진으로 인해 수 초 동안 SIV 출력 전압이 진동하는 현상이 발생할 수 있습니다. 이와 같은 전압 진동 현상은 일반적으로 플리커(flicker) 현상으로 분류됩니다.이 글에서는 논의를 단순화하기 위해, SIV를 저항 부하가 연결된 초퍼(chopper)로 모델링하여 설명하겠습니다.
1. 능동 제동의 핵심 원리: 수동 제동 제어 모사
능동 제동(Active Damping)의 근본 원리는 물리적인 저항이 수행하는 수동 감쇠 역할을 제어 알고리즘으로 그대로 구현하는 것입니다. 실제 저항을 추가하면 공진 에너지가 열로 소모되며 진동이 빠르게 줄어듭니다. 능동 제동은 이 “에너지 소모”를 컨버터의 전력 제어 루프가 대신 수행하게 만들어, 하드웨어 저항이 연결된 것과 같은 감쇠 효과를 얻습니다.

공진에 관련된 교류 성분만 분리해 보면, 시스템은 병렬 공진 회로로 단순화할 수 있습니다. LC 공진이 발생하면 공진 전압의 제곱에 비례하는 전력이 Rd에서 소모되며, 그 결과 공진이 억제됩니다.
능동 제동(Active Damping)은 저항 Rd가 하던 에너지 흡수(전력 소모) 기능을 컨버터(SIV)가 제어로 대신 수행하게 만드는 기법입니다. 공진이 발생하면 SIV가 듀티(변조 지수)를 조절해 저항이 열로 에너지를 소모하는 것과 같은 효과를 전기적으로 재현하며, 그 결과 공진 성분만 선택적으로 필요한 만큼 에너지를 흡수하거나 되돌려 보내며 공진을 억제합니다.

2. 전류 관점의 능동 제동(Active Damping) 원리
가상 저항에 흐르는 전류 I_Rd
물리적인 저항 Rd가 링크단에 병렬로 연결되어 있다면, 공진 전압 V_link_ac 에 의해 저항으로 흐르는 전류는 다음과 같습니다.

컨버터 입력 전류와의 관계
컨버터(SIV)의 변조 지수(Duty)를 D라고 하면, 링크단에서 끌어오는 입력 전류 I_in은 부하 측 전류 I_SIV와 I_in = D*I_SIV의 관계를 가집니다. 이때 능동 제동을 위해 추가로 흡수해야 하는 전류 성분을 I_Rd로 정의하면, 이를 만들어내기 위한 듀티 변동분 D_ac는 다음과 같이 결정됩니다.

능동 제동 모의시험
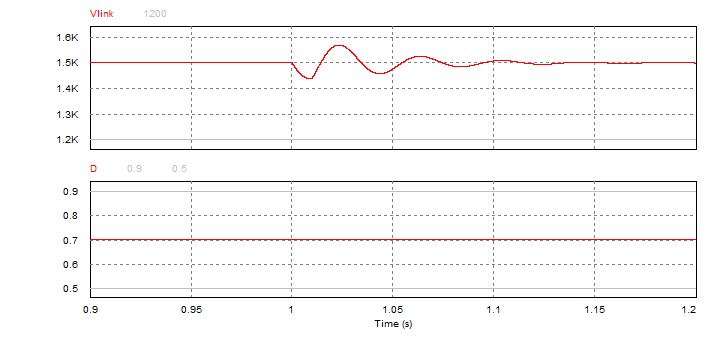
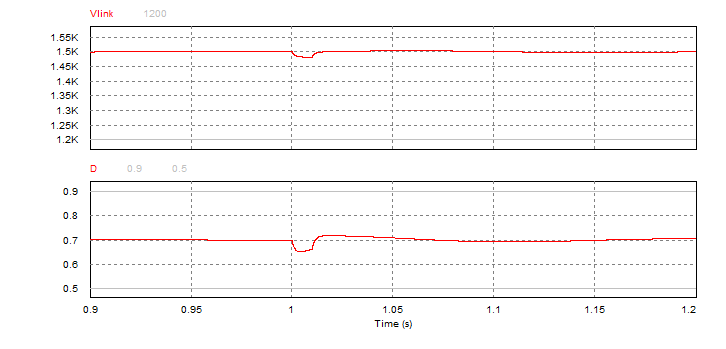
다음은 앞에서 설명한 방식으로 능동 감쇠 제어를 구현한 결과입니다. 직류 링크에 10ms, 50A(SIV 소모 전류의 약 40%)의 펄스 왜란을 인가하면, 능동 제어를 적용하지 않은 경우 직류 링크 전압의 진동이 약 0.1초 동안 지속되는 것을 볼 수 있습니다. 실제 시스템에서는 SIV가 정전력 제어를 수행하므로 부저항 특성이 나타나며, 이로 인해 진동이 더 길어질 수 있습니다. 반면 능동 제어를 적용하면 진동이 빠르게 감쇠하는 것을 볼 수 있습니다.
'제어 이론' 카테고리의 다른 글
| [제어 이론-50] DQ 좌표 변환과 비간섭 전향 보상(Feed-forward) (0) | 2026.01.16 |
|---|---|
| [제어 이론-21] PFC용 LCL 필터 공진 해석과 능동 제동(Active Damping) (0) | 2026.01.13 |
| [제어 이론-17] 비선형 시스템의 스텝 응답으로부터 PI 제어기 설계 (0) | 2026.01.12 |
| [제어 이론-19] PWM 컨버터의 진동을 억제하는 두 가지 능동 제동(Active Damping) (0) | 2026.01.11 |
| [제어 이론-18] 능동 제동(Active Damping)의 원리 (0) | 2026.01.10 |