
1. 수동 제동 회로의 구성 및 조건
먼저 LC 회로의 공진을 억제하기 위해 커패시터(C) 성분을 저항과 커패시터가 결합된 R-C 구조로 대체하여 R-L-C 직렬 공진 회로를 구성합니다.
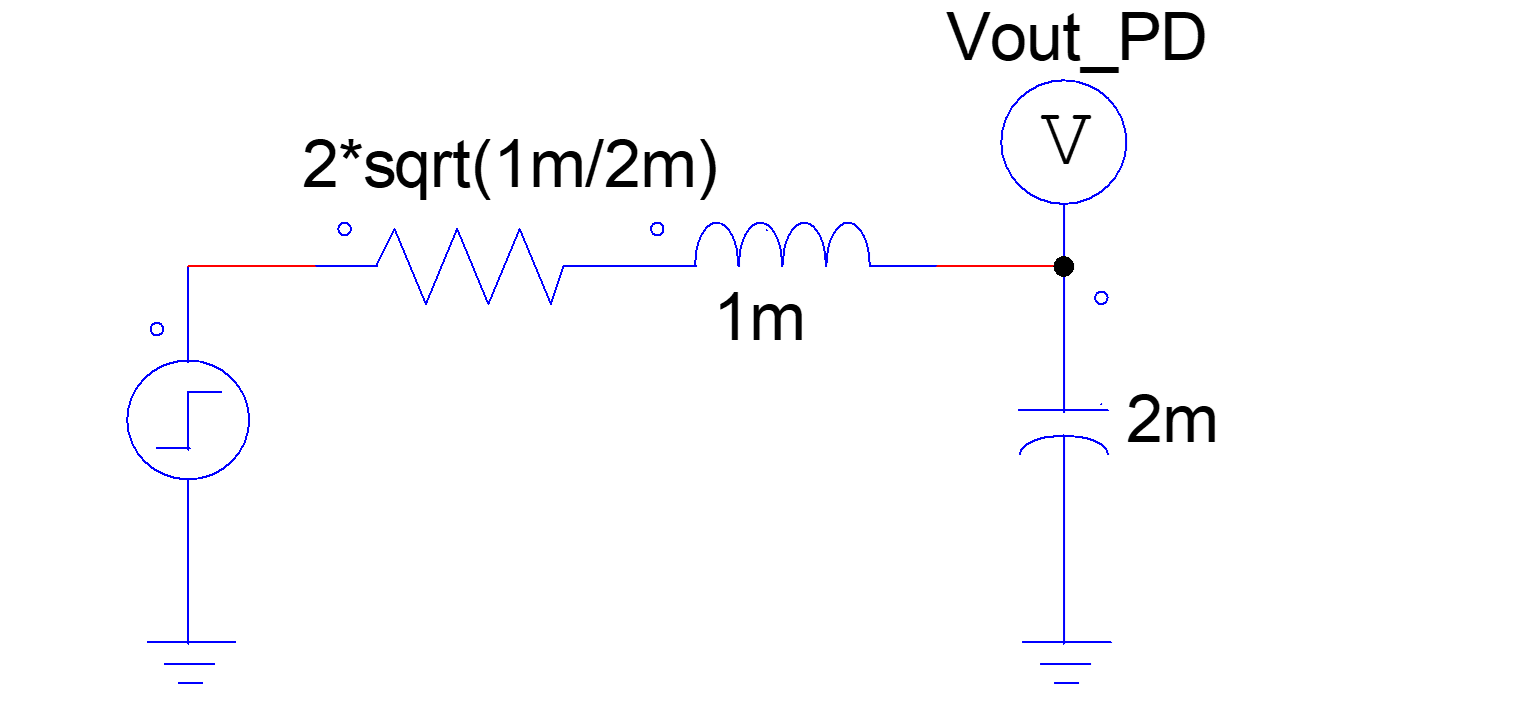

이 회로에서 진동이 발생하지 않고 평형 상태로 수렴하게 만드는 임계 제동(Critical Damping) 조건은 다음과 같습니다.

이때 저항 R은 공진 에너지를 열로 소비하여 시스템을 안정화하지만, 실제 저항기를 사용하면 지속적인 전력 손실이 발생하는 단점이 있습니다.
2. 능동 제동으로의 전환 (가상 저항 구현)
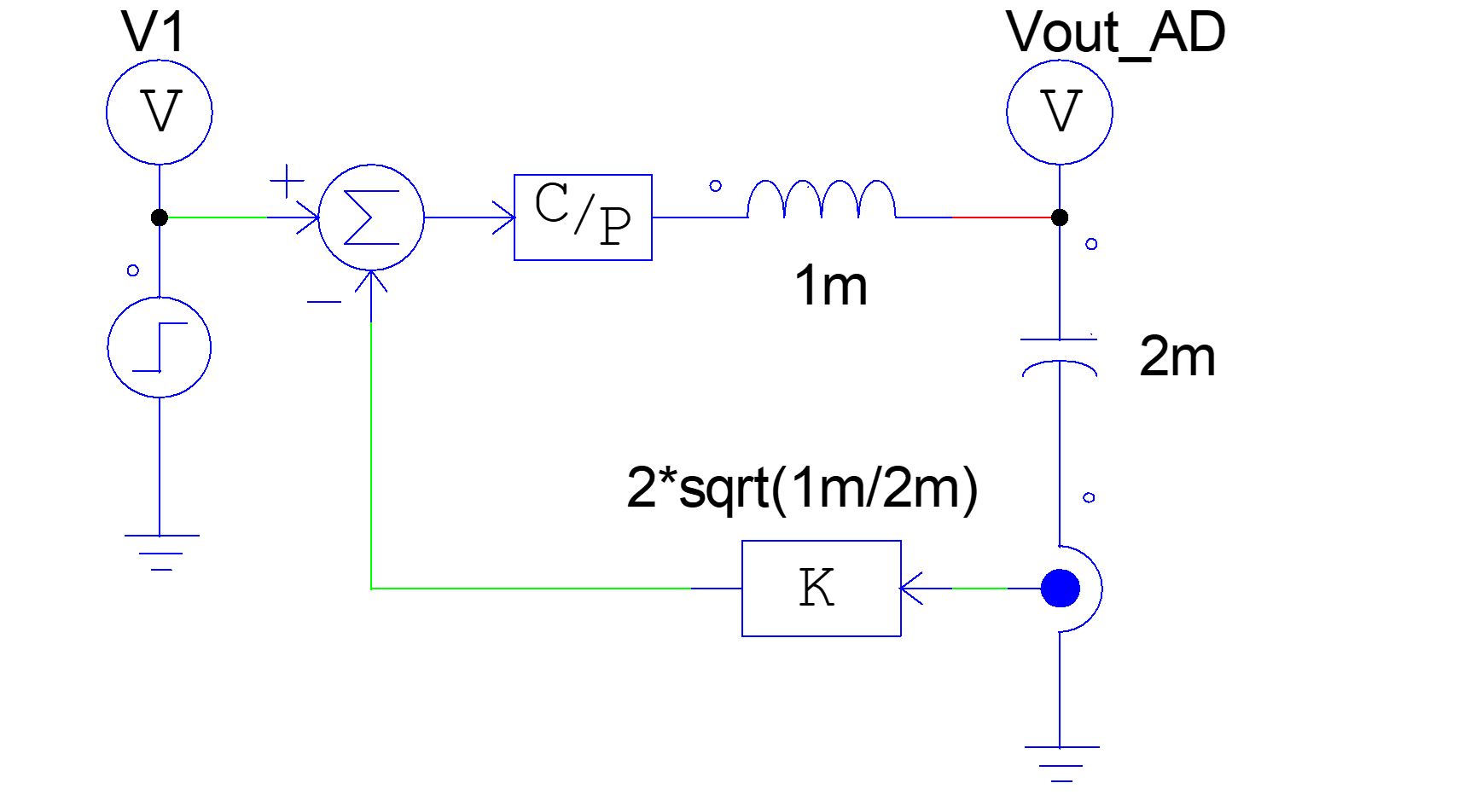
물리적인 저항기 R을 제거하는 대신, 제어기(구동기, Actuator)를 통해 동일한 효과를 내는 능동 제을 구현합니다.
- 원리: R-C 직렬 분로에서 저항 R에 걸리는 전압은 V_R = R * I_C 입니다.
- 방법: 커패시터에 흐르는 전류 I_C를 실시간으로 측정합니다. 그 후, 인덕터(L) 전단에 위치한 전압원에서 R * I_C 만큼의 전압을 원래의 지령값에 감하도록 제어합니다.

3. 결과 및 효과
이렇게 전압원에서 전류에 비례하는 성분을 조절해 주면, 회로 전체는 물리적인 저항기 없이도 마치 R = 2 * sqrt(L/C) 인 저항이 달려 있는 것처럼 동작하게 됩니다.
- 수학적 동일성: 전압원이 V_in - R*I_C를 출력하게 함으로써 회로 방정식상에 저항 항을 강제로 삽입하는 효과를 줍니다.
- 이점: 물리적 저항이 없으므로 효율은 유지하면서, 공진 주파수에서의 과도한 이득은 임계 제동 조건에 맞춰 효과적으로 억제할 수 있습니다.
4. 제어 대역폭과 공진 주파수의 관계
능동 제이 정상적으로 동작하려면 시스템의 제어 응답 주파수(Fcb)와 LC 공진 주파수(Fres) 사이에 충분한 간격이 있어야 합니다.
- 설계 기준: 일반적으로 L-C 공진 주파수는 제어 응답 주파수의 1/3 수준(Fres < Fcb/3)이 되도록 설계합니다.
- 이유: 제어기가 공진을 감지하고 전압원에서 보상 신호(R*I_C)를 내보내는 속도보다 공진 현상이 느려야만 유효한 제어가 가능하기 때문입니다.
- 수동 제동의 선택: 만약 공진 주파수가 제어 응답보다 빨라 능동적으로 따라갈 수 없는 영역에 있다면, 전력 손실을 감수하더라도 실제 저항을 사용하는 수동 제동 방식을 채택해야 시스템의 안정성을 확보할 수 있습니다.
5. 실제 시스템에서의 제 특성
이론적인 모의시험(Simulation)에서는 이상적인 소자를 가정하므로 공진이 무한히 발산하는 것처럼 보이지만, 실제 현장에서는 다음과 같은 이유로 자연적인 제동이 이루어지기도 합니다.
- 기생 성분: 전선이나 인덕터 자체의 저항(DCR), 커패시터의 등가 직렬 저항(ESR) 등 각종 미세한 손실 성분들이 존재합니다.
- 기계적 마찰: 앞서 도면에서 보신 것처럼 기계 계통의 마찰이나 공기 저항 등이 에너지를 흡수하는 역할을 합니다.
- 영향: 이러한 실질적인 손실들 덕분에 실제 시스템에서는 모의시험 결과보다 공진의 세기가 약하거나 저절로 제동이 이루어지는 경우가 빈번하게 발생합니다.
6. 실질적인 필터 콘덴서 전류(I_C)를 검출 방법
능동 제동을 위해서는 필터 콘덴서에 흐르는 교류 전류 성분을 정확하게 읽어내는 것이 무엇보다 중요합니다. 이를 위한 세 가지 실무적인 접근 방식을 소개합니다.
션트 저항(Shunt Resistor)과 연산 증폭기(OP-AMP) 활용
콘덴서 하단과 접지(GND) 사이에 미세한 저항값을 가진 션트 저항을 직렬로 연결하는 방식입니다.
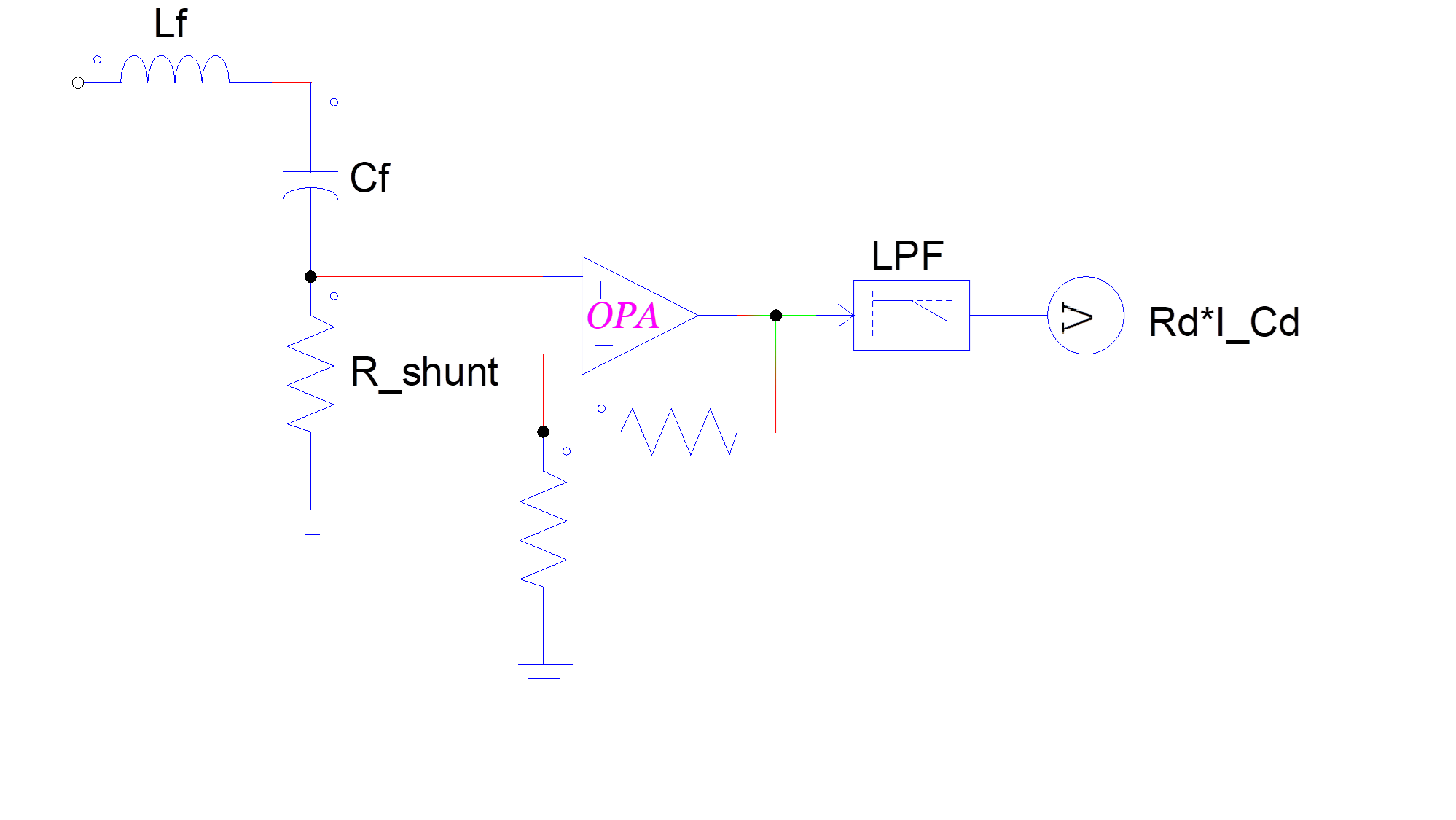
- 구현: 션트 저항 양단에 걸리는 미세 전압을 연산 증폭기로 증폭하여 제어기에 입력합니다.
- 장점: 전류의 크기와 위상을 가장 직접적으로 검출할 수 있어 제어 신뢰도가 매우 높습니다.
- 저주파 필터(LPF): 이때 LPF의 차단 주파수(Cut-off Frequency)는 우리가 잡고자 하는 공진 주파수(25Hz)의 10배 정도, 시스템의 스위칭 노이즈보다는 낮게 설정하여 제동 신호의 위상 지연을 최소화해야 합니다.
미분기(Differentiator)와 저부파 필터(LPF) 조합
콘덴서 양단 전압의 변화율이 전류와 비례한다는 원리($I_C = C \cdot \frac{dV_C}{dt}$)를 이용하는 방식입니다.

- 구현: OPAMP, Cdiff, Ddiff를 사용하여 미분기를 구성합니다.
- 구현: 전압 검출 신호를 미분기에 통과시켜 전류 성분을 산출하되, 미분 시 증폭되는 고주파 잡음을 제거하기 위해 저주파 필터(LPF)를 설치합니다.
'제어 이론' 카테고리의 다른 글
| [제어 이론-17] 비선형 시스템의 스텝 응답으로부터 PI 제어기 설계 (0) | 2026.01.12 |
|---|---|
| [제어 이론-19] PWM 컨버터의 진동을 억제하는 두 가지 능동 제동(Active Damping) (0) | 2026.01.11 |
| [제어 이론-16] 다양한 물리 시스템의 유사성과 전기 회로 모델링 (0) | 2026.01.10 |
| [제어 이론-15] IP 제어기: 느리지만 안정적인 제어 (0) | 2026.01.10 |
| [제어 이론-14] 이중 루프(Nested Loop) 제어: L-C 2차 시스템은 2개의 1차 시스템으로 나눠서 제어 (0) | 2026.01.10 |